4 May 2016
A Technique for Recovering Small Sensor Signals from The Noise
When working with sensors at the transducer level, one common challenge is amplifying and filtering the often miniscule signals generated by the tranducer. For example, a Hall-effect magnetic transducer generates only about 20uV of signal per gauss of applied magnetic field. Other commonly encountered transducers such as thermocouples may generate only a few tens or hundreds of microvolts per degree C.
In an ideal world small signal levels would not be a problem - just feed them into an amplifier and boost them up to useful levels, such as 0-5V to feed into an analog-to-digital converter (ADC). In an ideal world, however, you would also get the winning lottery ticket every Monday. One of the many less-than-ideal effects you have to deal with when trying to capture small signals is electrical noise.
The figure below shows an idealized signal chain for a resistive bridge-type sensor. It comprises a bias generator that provides an excitation voltage to the bridge. The bridge in turn generates a small differential voltage in response to the resistance values of the two variable legs - these resistors vary in response to what is being sensed - temperature and mechanical strain are commonly measured using resistive bridges. The signal from the bridge then is fed into an instrument amplifier which measures the difference in the two output voltages, and may also provide amplification. The amplifier's output is then filtered and reported as a measurement.
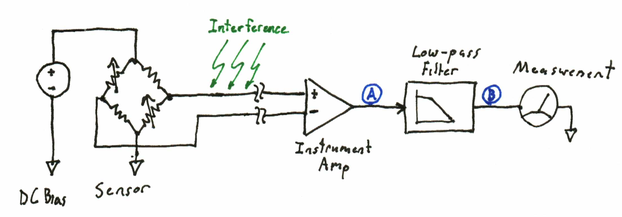
In the ideal world, the filter would not be necessary as the voltage received by the instrument amp would be perfectly representative of the bridge measurement. In our world, however, there is a good chance that there will be additional unwanted signals mixed in - some picked up from the external world by the wiring between bridge and amplifier, and some generated intrinsically from the components themselves. In the plots below, you can see the effect of some deliberately added noise on the signal. The top trace (green) shows the ideal transducer signal in response to a step-varying stimulus. The center trace shows the signal when contaminated by white (random) noise - with about 4 times as much noise as signal. You can see the general pattern of the orginal signal in there, but it isn't clear.

One approach for dealing with the noise is to apply a filter. The effect of doiing so can be seen in the bottom trace (red) which is overlaid on the ideal signal. While some of the noise has made it through -it isn't a perfect reproduction - the signal is still quite recognizable.
One thing that worked in our favor in this case was that the interfering noise was white noise, which has frequency components over a wide range of frequencies - much wider than the signal itself. By using a fiter with a cutoff frequency not all that much higher than the frequency of the signal of interest it was possible to exclude most of the noise without exclusing too much of the signal. You can see this effect with a high-bandwidth scope (1GHz+) when you switch in the 'bandwidth limit' function on one of the probe channels - the trace will typically get a lot less fuzzy. This occurs becuase the bandwidth limit - typically 20MHz- is going to exclude most signals above this value. So if you have broadband noise over the entire 1GHz range, flipping that limit switch is going to exclude 98% of it, making the signal look a lot cleaner very quickly. Of course, this is only effective if the signals you want to see are below the 20MHz limit, otherwise you exclude them as well.
The above example worked well because the interfering signal was random noise. Another case is where you have interference with a definite frequency. Some typical sources are 60Hz AC lines, flourescent lights, motors, and anything with a transmitter in it, such as a cell-phone or wireless device. In the case below, we have added an interfering signal whose frequency is within a factor of 10 of that of the transducer signal.

In the top plot (green) is the ideal transducer signal as in the case before. When the interfering signal (sine wave + white noise) is added, the ideal signal becomes virtually invisible in the moddle trace (blue). In the bottom trace (red), which has been filtered as before, you can see that the filtered removed most of the white noise, but the sinusoidal interference is still present to the point where it overwhelms the transducer signal.
While it might be possible to get better results with more filtering, there are other ways of extracting the signal from the noise. One of the simplest and most powerful is synchronous detection, which is also known as lock-in amplification in some circles.
The figure below shows the basic synchronous detection scheme. Instead of biasing the bridge with a DC source, we use an AC sinusoidal source. The source shown below provides symmetric drive - when the top of the bridge goes positive, the bottom goes negative and vice versa. The frequency for this bias signal is chosen to be significantly higher than that of the transducer signal. In this case the transducer signal is 10Hz and the bias signal was chosen to be 1kHz. This results in an AC sinusoidal output from the bridge at 1kHz, with amplitude proportional to the voltage that the bridge would have output when biased with the DC source. The symetric bias keeps the bridge output symetric about zero voltage.

As before, an instrument amplifier is used to convert the double-ended bridge signal to a single-ended one, and optionally provide some amplification. Instead of being fed into the filter, however, the output of the instrument amplifier is then multiplied (in analog-ese this is called demodulated) by the sinusoidal bias signal. The result of this mutiplication is then filtered to provide the measurement.
So what do all of these signals look like? In the plot below, the ideal transducer signal is shown at the top (green). The output of the amplifier (with no noise - blue) is a sinusoidal signal at the bias frequency that has been multiplied by the bridge imbalance. When white noise is introduced, the amplifier output can be seen in the middle trace (red) where the noise is apparent. After passing through the multiplier, one can see faint traces of the ideal transducer signal hiding in noise. Finally, after filtering the multiplied signal, one can see a recovered transducer signal in the bottom trace (violet) overlaid on the ideal transducer signal (green).

This process may seem like an awful lot of trouble and unnecessary expense to get similar results to the basic filtering scheme we first discussed. Where it shines, however, is in the tough cases where there is interference coming in on nearby frequencies. As before, we will introduce interference comprising a sinusoidal signal and white noise.
In the plots below, the top trace (green) shows the ideal transducer signal, and the second trace down (blue) shows the amplifier output in the noise-free condition. The middle plot (red) shows the amplifier output when the interfering signal is applied - again virtually no trace of the transducer signal can be seen. When this signal is multiplied by the AC bias, the result can be seen in the 4th trace down (cyan). A little evidence of the transducer signal can be seen, but not much. Finally, when this signal is filtered, the transducer signal emerges (bottom trace, violet) and can be seen to be representative of the ideal transducer signal. Most significantly, it is substantially free from both the white noise component and the sinusoidal component of the interfering signal.

In part 2 of this blog we will discuss how synchronous detection actually performs its magic - Stay synchronized!